![]()
![]()
![]()
![]()

Bei der BIMKIT-Abschlussveranstaltung "Mit KI zum digitalen Bauwerksbestand" am 11. Juni 2024 werden die Ergebnisse des Projektes präsentiert und die entwickelten KI-Dienste vorgestellt, um das Potenzial von KI in der Bauwirtschaft zu zeigen.
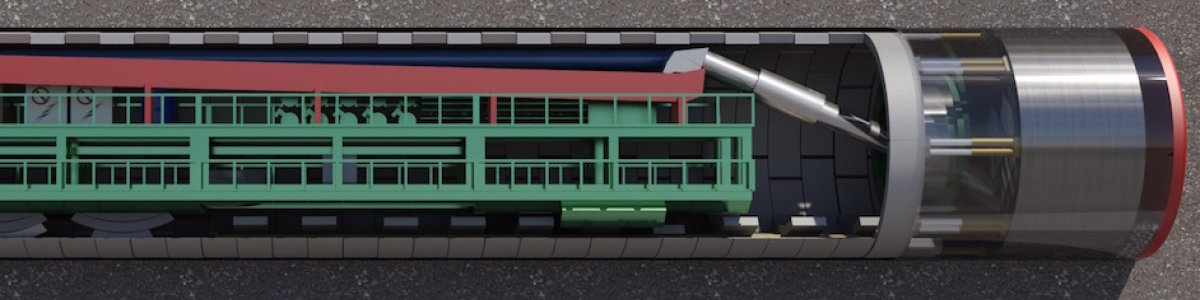
Das Innovationsprojekt BIMBreitband hat das Ziel, den Breitbandausbau in Deutschland durch den Einsatz digitaler Modelle erheblich zu beschleunigen und die Versorgung mit Hochgeschwindigkeitsinternet zu verbessern. Es werden Konzepte zur digitalen Unterstützung von Zustimmungsverfahren sowie vor- und nachgelagerter Genehmigungs- und Abstimmungsprozesse im Rahmen des Breitbandausbaus unter Verwendung von Building Information Modeling (BIM) erarbeitet. Ein besonderer Schwerpunkt liegt auf der Einbindung aller Beteiligten sowie der Integration von digitalen dreidimensionalen Bestands- und Planungsmodellen, um eine nachvollziehbare Kommunikation und Entscheidungsfindung zu ermöglichen.
Lehrstuhl für Informatik im Bauwesen
Fakultät für Bau- und Umweltingenieurwissenschaften
Ruhr-Universität Bochum
Universitätsstrasse 150
Gebäude IC 6-63
44801 Bochum
Tel.: +49 234 32 - 23047
Fax: +49 234 32 - 14292
Sekretariat:
iib+office@rub.de
Öffentlichkeitsarbeit:
iib+socialmedia@rub.de
Copyright © 2024
Letzte Änderung: 19.04.2024 | 19:12 Uhr




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}