![]()
![]()
![]()
![]()
Currently there are no topics.

This master’s thesis investigates the exchange between bridge structural analysis and Building Information Modeling using programming languages. The demand for infrastructure projects has grown significantly in recent years, especially in the realm of bridge construction. However, the shortage of skilled labor in this field has caused delays in the necessary development and restructuring of such projects. Furthermore, the workload of today's engineers has become excessive, which presents challenges when faced with the need to accommodate more traffic on bridges. One potential solution is the creation of an efficient dataflow system. This system would involve the highly automated exchange of information between the structural analysis model and other deliverables. By implementing such a system, engineers would be able to streamline their workflows and improve the overall efficiency of the design and construction process. The study defines the information content of construction models in Revit for three common types of bridge families, including frame bridges, and T-beam bridges. The interface for receiving and manipulating the data in Revit is implemented via a script. The data, which is used to generate the Sofistik Teddy-Text files, includes definitions of geometry, materials, and five types of loads. This script semi-automates the creation of the Finite Element model for multiple bridge types. The information is further utilized to export data sheets, providing a quick overview for engineers and clients, as well as list the relevant input values for statical reports. While defining a data pipeline for this manual process, the new system seeks increasing efficiency and behaves more flexible for possible changes in a project. This assists the structural engineer in avoiding the need to consult several documents and repetitively perform the process of planning. The data is also valuable for testing the model and ensuring compliance with guidelines such as Deutsche Bahn, RAB-ING, and others, along with providing additional services outlined in the Honorarordnung für Architekten und Ingenieure, including quantities, costs, reports, etc. The study assesses the possibilities of utilizing the data for other tasks as well. This study evaluates the impact of automation compared to non-parametrized 2D planning methods on projects that involve both single bridge and multiple bridges. The focus is particularly on projects with multiple bridges as automation is believed to have a greater impact on such complex projects. Moreover, The quality of the Finite Element model is assessed by comparing it with the existing Add-Ins available for BIM software. Limiting the scope to a few families aims to generate more consistent mesh structures. In the end, the amount of saved working time is quantified.
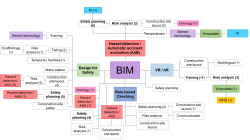
Construction is one of the most dangerous industries for workers due to the constantly changing conditions on site, the use of large construction machines and a great diversity of working environments and people. In addition, the industry is subject to constant time and cost pressures, as well as shortages of skilled workers and personnel. All of these factors accumulate and exacerbate existing occupational health and safety issues. As the use of Building Information Modeling (BIM) becomes more widespread, the likelihood of using enhancing technologies to improve occupational health and safety also increases. Using the PRISMA method, frequently used approaches from research and their most commonly cited purposes were identified. As a result, the technologies and research approaches selected as examples were evaluated and classified by experts from the construction industry in the form of qualitative expert interviews with regard to their feasibility. According to the results of the expert interviews, the most applicable and versatile extensions of the BIM method are Design for Safety (DfS) and Rule-based Checking. The use of Radio Frequency Identification (RFID) is mainly limited to large construction sites. The use of virtual reality (VR) and augmented reality (AR) technologies proved to be difficult to implement due to technical hurdles and excessive costs. Conclusions are that complementary BIM-based technologies should be considered more often and their use should be promoted due to the manifold possibilities of application and improvement. In addition, with regard to the technical competencies of actors from the construction industry, more training courses could be offered and smaller companies could be supported with investment costs in order to enable a more widespread use of technologies. Furthermore, a two-way information transfer between research projects and their results as well as the needs from the construction sector should be strived for via different channels.
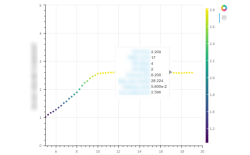
Nowadays, the demand for the electrification of personal mobility has increased. In the automotive industry, development cycles with high-cost pressure have to be managed faster than before with low development costs. Roll-bonded cooling plates are a new production technology in this business. To discuss the manufacturing feasibility of roll-bonded cooling plates, some essential quantities and parameters should be analyzed. In order to evaluate these parameters, two simplified and validated finite element-based models are designed, which can simulate all parts of actual cooling plates. An automisation strategy creates thousands of different models for generating data. After constructing and pre-processing data sets for different quantities, different machine learning algorithms were trained and evaluated on each single data set. A comparison between the actual and predicted results admits that machine learning algorithms could precisely predict the quantities with high R-squared of around 0.9999. Among all algorithms, the extra tree regressor algorithms had the best performance and visualization in all data sets. Finally, a web application is designed, which enables the designer to quickly judge if a design is manufacturable.
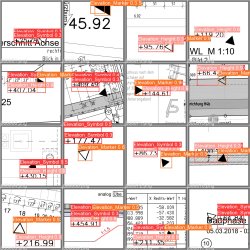
Creating building information models for existing buildings can be challenging. The data is often not available in a useful digital format. This thesis uses the deep learning-based single-stage object detector YOLOv5 in an effort to automate the detection of elevation markers in construction drawings. Training data is synthetically generated to overcome the bottleneck of available training data. The detector is successfully trained on the generated data. Additionally, data augmentation techniques are used to improve the performance of the trained detector. The best performing model achieves an mAP0.5 of 0.624.

Scene understanding from image data aids diverse applications in construction and maintenance. Recently, deep learning models have been employed to extract useful information from visual data at construction sites. These information be used in specific use cases such as site supervision, item detection and material management. One of the most important prerequisites for accurately training a deep learning model and it’s application in computer vision is the availability of a large amount of correctly labelled data. Gathering and labelling large amounts of high-quality photos with the necessary characteristics to train a deep learning model and the diversity can be prohibitively expensive and tedious. Synthetic data can solve both the acquisition and annotation problems of working with visual data. With the existence of modern powerful game rendering engines like Unity and Unreal Engine, these can support the generation of insightful visualizations from synthetic data. Generating realistic images includes environment preparation, noise modeling, and rendering. To address this issue, this thesis focuses on a method for generating high-quality synthetic data that includes the automatic annotation of rendered scenes. The method comprises of four steps: 1) translating 3D model geometries into photorealistic images, 2) automatically annotating the images to generate different synthetic datasets, 3) performing a comparative study on test datasets, and 4) gathering the insights and merging the selected synthetic datasets together to form the final synthetic data set.

Für die nachträglich Erstellung von 3D-Modellen für bestehende Gebäude werden unter anderem Deep Learning-Modelle genutzt, um Grundrisszeichnung in semantisch besetzte Segmente zu unterteilen. So wird etwa jeder Raum und jede Wand durch eine pixelbasierte Maske repräsentiert. Um diese Segmentierung für die 3D-Modellierung nutzen zu können, muss sie jedoch einer Nachbearbeitung unterzogen werden. Zwei Aspekte dieser Bearbeitung werden in dieser Bachelorarbeit näher beleuchtet: Erstens wird die Pixelregion in eine vektorbasierte Darstellung, d.h. ein Polygon, konvertiert. Zweitens wir das Polygon so nachbearbeitet, dass den zugrundeliegenden Raum bestmöglich abbildet. Für beide Schritte werden mehrere Techniken miteinander verglichen.
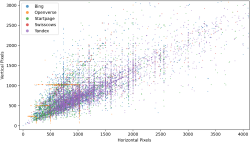
In the modern age, the process of designing and planning new buildings makes use of more and more digital tools such as building information modeling and machine learning. For the purpose of training models to perform steps in the process of creating digital models of existing buildings, many raw data points are required, including datasets of floor plan images. Not many such datasets exist and are freely available, and those that do are often small and lack diversity, being gathered from few sources such as architectural offices which generally employ similar styles of drawing and design for all their floor plans. This paper presents a methodology to assemble new and diverse floor plan datasets using web scraping and machine learning. Floor plan images are scraped from the results pages of multiple popular internet search engines. As search engines tend to include undesirable images in their results, the obtained dataset is classified by a machine learning model to detect and remove unwanted images. Multiple models are tested for this classification task and the best performing model is chosen. Analysis of the scraped data shows varying behavior between search engines, with some returning more applicable search results than others. Since the images in the final dataset, consisting of 4.995 images, originate from a multitude of websites, they come in varying sizes, types and styles, forming a dataset more diverse than many comparative ones. Said dataset can, for instance, be used for the creation of machine learning models aiding in the task of digital building modeling, simplifying the creation of new structures. The created dataset could further be enlargened by scraping additional websites or using more search queries, including different languages. Additionally, multiple servers or proxies may be used to avoid encountering bot detection mechanisms and captchas during scraping. The machine learning models may be improved by providing more training data and using random input augmentations to reduce false positive detections.
The current state of the art supports the creation of 3D BIM models in various software programs. Furthermore, it is possible to introduce design adjustments into the construction process and divide them into three variants: Construction, functional and product variants. VR will be used to visualize the use of variant management to provide decision support. With this background, the present work was dedicated to evaluating the use of virtual reality for variant management in BIM models. First, the basic elements of the work were defined. This was followed by the visualization of the 3D model with the variants in VR. First, a BIM model was created in the BIM software Revit, then the model was copied and extended by the three variants. Using the Unity Reflect plug-in, the models were exported from Revit and imported into Unity Reflect-Review. This made the models visible in Unity Reflect-Review. Based on this, the Unity Reflect-Review toolbox could display information and the variants within the model. This is because the filter function could be used to show and hide the variants within the model. The implementation enables the use of virtual reality for variant management in BIM models. The core of this work is the evaluation of its use. Accordingly, based on an empirical study in which the quantitative method was followed, a questionnaire was created to evaluate the requirements and benefits of using virtual reality. According to the results of the survey, the participants evaluate the conception positively. The software from the implementation meets most of the requirements and needs of the respondents.
Many German road bridges were built before the era of digitalization. Due to increasing traffic, the service life of many bridges is shortening. As a result, about one third of all bridges will have to be refurbished in the next few years. Many of the bridges in need of rehabilitation are not digitally recorded, which makes it difficult to use digital methods for planning. As a result, the potential of building information models cannot be exploited. At this point, a digital as-built model needs to be fully generated. This requires a way to record the bridges cost-effectively and precisely. Terrestrial laser scanning is used to record objects quickly and precisely. However, there are no general regulations or recommendations on how the quality of the recording or the process itself should proceed, since the quality of the recorded inventory data has a significant influence on the modeling effort. This is the starting point of this bachelor thesis. In the following, factors which are suitable for a good inventory are identified by a literature research. As support, expert interviews are conducted to incorporate empirical values. Based on these two fundamentals, a concept is developed that takes into account different factors, such as the accessibility of the structure or variation in the number of measurement points. Finally, the elaborated concept will be evaluated on a bridge as an example and transferred into a "Best-Practices"-guideline.
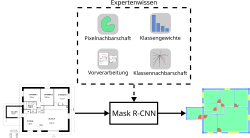
Architectural floor plans can be a valuable source of information to reconstruct digital twins from existing building documentation. In this regard, room geometry and topology, for instance, are essential information to create building models and therefore need to be extracted from drawings. In case the drawings only exist as raster-image files (e.g. from scanning), engineers have to be assigned the tedious task of converting the pure image data into geometrically rich models. Driven by advances in deep learning-based image processing methods and the need to automate the extraction of floor plan geometry, earlier studies successfully subjected floor plan images to semantic segmentation and instance segmentation. This research focuses on potential improvements to these approaches, which are primarily motivated by concepts of informed machine learning (IML), in which expert knowledge is integrated to accelerate the training process and improve inference performance. A baseline Mask R-CNN model is trained on an open-source dataset and is compared to models enhanced with IML techniques. Among others, the effects of (1) a neighboring pixel loss, (2) a weighted cross-entropy loss, and (3) human preprocessing are investigated. Finally, the most promising techniques are combined to train a model which outperforms the baseline by a decent margin. In general, all of the proposed IML techniques improve segmentation results and can be considered in the development of future methods for segmenting floor plan images.

Today much of the data required for processes in the construction industry only exists in analogue form which becomes a problem at a time when more and more work is done digitally. In particular, many tabularly structured documents are often only available in analogue form. This means that the engineer often has to dig through piles of paper until he finds what he is looking for. But even when he finds what he's looking for, he often has to manually convert it into digital form to continue his work, which takes a lot of time. On the one hand, the data can also be scanned, but on the other hand, it is then only available as an image, which makes automatic processing difficult. Additionally, older terms are often used in analogous tables which becomes problematic if you want to search its content automatically. In order to address this problem it is necessary to develop methods that help to digitize these tables. Therefore, this thesis applies several deep learning algorithms to recognize columns and rows in tables. Also, a user interface is developed that makes it possible to extract the data of these tables and search its content based on string matching and, additionally, the underlying semantics which is achieved for a single word by training a word2vec model. In a final step the used algorithms are compared in terms of their accuracy and their hardware requirements.
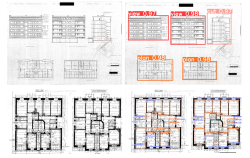
Artificial Intelligence is becoming more prominent each day. Many fields try to implement it in their workflow. With the increase in the importance of Building Information Modelling, there is a need to have information about construction projects in digital form. While being some of the oldest forms of documentation for buildings, 2D plans contain a lot of information that is of great use, especially in the case of as-built plans. Several attempts have been made to extract information from 2D plans in an automated manner, some of them including Artificial Intelligence. While some researchers have used synthetic data to train Deep Convolutional Neural Networks for automatic extraction of information from 2D plans, others have used existing plans. This work aims to extract information from old scanned 2D plans using Deep Convolutional Neural Networks and in this manner to try and get an understanding of how Deep Learning manages this scenario. A comparison between different Neural Network architectures is conducted and an image-slicing method is explored, to detect small objects. Furthermore, a hyper-parameter tuning strategy is conducted in order to get the best combination possible between them. Lastly, a Microsoft Excel file is created to present the information extracted and a simple Flask Web App is built, in the form of a proof of concept.
The construction sector is one of the most resource-intensive sectors and responsible for a considerable share of energy consumption, greenhouse gas emissions and the binding of highly demanded raw materials. Therefore, it is up to the construction sector to meet climate targets and reduce resource consumption of construction materials. The infrastructure sector in particular, and especially the road sector, makes a significant contribution to this. By taking a holistic view of the life cycle of construction materials, the environmental impact can be quantified and measured. Even though digitization and the application of BIM (Building Information Modeling) methodology are making steady progress in the road construction sector, their share is currently still limited. Therefore, the integration of LCA (Life Cycle Assessment) into the BIM methodology is also still in the early stages. With this in mind, a methodology was created that performs automated LCA for parametric road structures. In a first step, the useful data structuring was worked out on which the subsequent modeling is founded. Based on this, different parametric cross sections have been created and adapted. In the following LCA step, the parametric road models are linked to the assigned environmental impact data, which are retrieved from the German ÖKOBAUDAT database. Meanwhile, the methodology was applied to diffrent typical road superstructures and a comparison of route variants. In addition, a detailed and transparent description of the necessary processes was provided. The developed method therefore represents an approach to perform BIM-based resource assessments even for the infrastructure sector, taking into account a high level of model adaptability and parameterization, while at the same time allowing the environmental impacts of road construction projects in a simple and transparent manner to be recorded. For further model exchange and processing, a property set has been created automatically, which links the relevant LCA and material data with the road model in order to represent them in the open neutral IFC data exchange format. It can be assumed that in the future, the holistic consideration of environmental impact aspects will become increasingly relevant, especially for road construction projects. However, at present, there are neither BIM-integrated LCA tools nor a high number of environmental product declarations (EPDs) that have been calculated specifically for the infrastructure sector. Therefore, there is a high need for action and research in this area. The developed methodology intends to reduce this gap by proposing an automated BIM-LCA integration for parametric road models.

Cracks in concrete and rusting reinforcing steel can pose a critical threat to the stability of buildings. Therefore, reliable detection of these damages as part of maintenance plays an important role in ensuring the safety of civil infrastructure. Conventional image processing-based methods are set to one damage type and lack the adaption to new environments in real world-situations. By using images from mobile devices this thesis presents a comparison of three convolutional neural network architectures to locate and classify the mentioned damage types. Two datasets were created for this task and varied by applying Data Augmentation. For classifying images with a 227×227 pixel resolution a 98.03% f1-score was achieved. In a second step, the networks were transformed to fully convolutional networks and applied to images of different aspect ratios. Thereby, the proposed method has successfully achieved a f1-score of 96.28% in classifying cracks and corrosion. The segmentation of the images on a grid level can further be used for the digitalization of the damages.
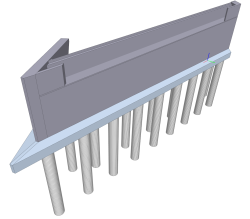
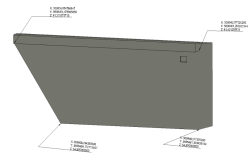
Building Information Modeling (BIM) describes a new way of digitally designing and managing a construction project, furthermore it can be used to manage relevant data for the whole time of usage of the building. Compared to a more traditional planning process, BIM streamlines multiple workflows into one, in turn reducing the potential for errors, increasing collaboration between parties and overall efficiency. While the before mentioned is certainly true for plain buildings, the same can not be said for the planning of infrastructure projects, where the use of BIM needs to be expanded upon and further developed to grasp its full potential. In the beginning, an overview of the currently practiced workflow is given, with an emphasis on the encountered issues. The biggest problem is the lack of a generic conversion between the BIM model designed to be used for planning and the static abstraction needed for advanced Finite Elements Analysis (FEA) calculations. Subsequently a new data format, still in development, will be investigated in regards to its current status, and implementation within certain BIM software. The Interfaces main aim is to close the missing link and therefore enabling any geometric model to be examined structurally even without the manual implementation of specific components. In the practical part of the thesis, a complex abutment is designed, and analysed.The afore mentioned data format is used to generate the corresponding staticabstraction and is examined based on predetermined criteria, including reliabilityand time efficiency. With this, the possibility to easily calculate advanced geometric models is proven. These findings may conclude that the improved workflow will be of further use for the whole BIM development.
Due to increasing axle loads and the constantly growing heavy goods traffic in the federal road network, the need for maintenance in the federal road network is also increasing. With mandatory integration of the BIM methodology in infrastructure construction, a 3D model is a prerequisite for the use of the methodology in all lifecycle phases. However, as-built models are not always available for infrastructure structures, modern surveying techniques already make it possible to record an as-built building at low cost. Among them most prominent one is laser scanning with the result of a point cloud. Point clouds serve as information sources, whereby they contain dimensions of the structure. However, converting the geometry data into a digital BIM model is still a laborious process. With the help of AI methods, this process is to be automated. For this purpose, methods from the field of machine learning are used, which enable the generation of surfaces from a segmented point cloud. The segmentation of the point cloud was assumed. In terms of reconstruction, different subcategories of the use case of inventory detection and modeling are pointed out and the associated requirements are formulated. Finally, a benchmark method is established to compare the AI methods. Regarding the reconstruction of the point cloud, geometries enriched with semantic information are not expected. Instead, surfaces are computed as results, which will be used to enable a partially automated reconstruction of the point cloud afterwards.
The Stufenplan „Digitales Bauen und Betreiben“ initiated by the Federal Ministry of Transport and Digital Infrastructure (BMVI), the use of Building Information Modeling (BIM) in major projects will be mandatory from 2020. Public clients in particular are relying on "openBIM" methodologies with the aid of open data formats. In the course of the planned introduction of the BIM methodology in the Department 5.2 Construction Management of the Ruhr University Bochum, a comprehensive requirements analysis is to be carried out, in particular of the exchange relationships and the use of building information models. Relevant requirements and processes will be collected and documented by reviewing provided documents, interviews and other appropriate methods. Based on the collected information, an ideal openBIM deployment scenario will be mapped, in which the use of an Information Delivery Manual (IDM) will be validated.
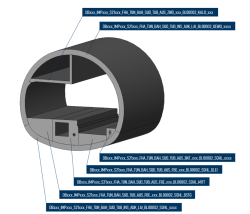
To promote the widespread use of BIM in the construction industry, guidelines and standardizations enabling efficient use of models must be created. The development of data catalogs and object templates is an important step towards standardized models that can be used practically in different BIM use cases and contain necessary information. DAUB has published a general modeling guideline and a data catalog for models in underground mining called Digital Design, Construction and Operation of Underground Structures -BIM in Underground Mining and the corresponding supplement called Model Requirements -Part 1. It provides a general project structure and rules for object coding. The data catalog contains objects and relevant characteristics of underground mining and is intended to provide a modeling basis for models. In this thesis the modeling guideline as well as the data catalog are reviewed in their applicability. Therefore, the guidelines are applied to tunnel models of a real project. Selected BIM use cases will be performed with these models to evaluate the practical applicability of the guidelines. Another aspect of the thesis deals with the general structure of the data catalog and evaluates it regarding interoperability. The interoperability requirements of ISO 23386:2020-03 are used as a basis for this.
For some years now, the term BIM has been widely used in the construction industry. Today, this method is used especially in building construction projects. Engineering structures, on the other hand, are due to their complexity a special challenge for the application of the BIM methodology. This thesis deals with the planning of a real engineering structure.
Blocking notice
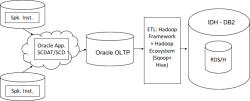
Today, Business Intelligent Technologies are considered one of the most promising areas of the IT market in the world. It is therefore more important than ever to manage the stored data and information faster. In the concept of big data, data warehousing plays an essential role, since process optimization, analysis and improvement as well as data management can be developed and realized thereby. In this thesis, the Business Intelligence as well as Big Data and the Data Warehouse (DWH) and their ETL processes (extraction, transformation, loading) were conceptually described. The focus of this thesis is on the investigation and implementation of the possibilities for optimizing DWH-services, data analysis and data management. In addition, the company Finanz Informatik GmbH and their implemented DWH, data management and data delivery methods were onsiderd.
The general methods for optimizing a DWH and related data management were also discussed. The main part of the master’s thesis comprises the detailed analysis of the requirements of the Finanz Informatik GmbH from a technical and professional point of view as well as the the examination and the comparison of the usual investigations in this context. After the prioritization and the analysis, some of the optimization possibilities are modeled and implemented both conceptually and logically. Subsequently, the implementations were tested, compared with the criteria catalogue and evaluated. In this master-thesis, it has been shown that with the use of optimization and data-management methods can the performance of a DWH be improved and the data quality management be enhanced.
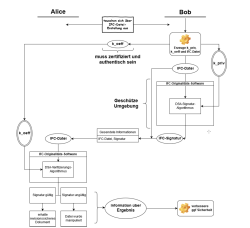
Technological progress does not stop in the construction industry: Building Information Modeling (BIM), which is used for construction planning and described via IFC files, is booming in Germany. The government-supported and developed platform BIMSWARM wants to make this digitization of the construction industry affordable for small businesses as well. As a result, more and more IFC files are commissioned and the planning process of buildings will be revolutionized in the long term. There will also be new requirements for protection against attacks and manipulation of these files, in order to guarantee companies flawless and safe construction plans.
During this bachelor thesis various approaches and methods for the originality verification of IFC files were researched and presented. Subsequently, a method was selected on the basis of broad criteria, which can be used to implement a verification software. Furthermore, a concept for the course and the architecture of the planned software was designed, which will eventually be available on the BIMSWARM platform. If successfully implemented, it will be possible to ensure the integrity and long-term security of IFC files related to BIM at the legal level as well.
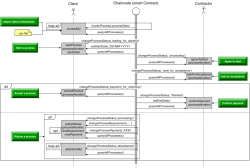
As the scale of construction projects become larger and the labor becomes more expensive, informatization and digitization gradually become more important in the Architecture, Engineering and Construction (AEC) field. The availability of the BIM (Building Information Modeling) method provides the construction industry with an excellent opportunity to digitally document and automatically calculate performance levels in detail. In combination with blockchain technology, revision-proof documentation and real-time information sharing can now be carried out. In this case, various applications in construction can be supported. These include the delivery and acceptance processes for the financing of projects, coordination of planning, billing of building services or building operation. In this thesis, we firstly analyze the existing research on the introduction of BIM- and blockchain-related concepts. Then, we conduct design research with a prototype implementation to introduce a demo system of running 5D BIM-based data in blockchain to digitize construction processes. Finally, we discuss several aspects which can be improved and further developed in the future.
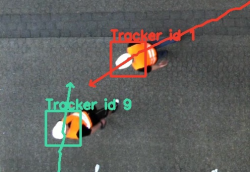
On construction sites workers are exposed to several dangers. Especially cranes are considered dangerous, because they can potentially cause accidents by being struck by crane load. In the worst case they cause fatal injuries. It is necessary for crane operators to know the location of nearby coworkers. By improving communication among workers and crane operators it is possible to reduce the risks of accidents. An automated system specialized in warning and signalizing potential dangers could prevent further casualties.
By using cameras that can be attached to cranes this thesis presents a method for tracking workers. Considering the implementation of methods in the fields of computer vision and machine learning the tracking system is established. The tracking process is structured in three phases. To isolate objects and persons the first phase separates for- and background using a background subtraction. Using the soft cascade method trained to detect worker the second phase classifies isolated regions in the foreground. Finally, using the kalman-filter workers will be tracked.
Results are evaluated by analyzing roc-curves to detect a nearly optimal classifier. Manually marked images are used to compare against the detection and valued. Those results can then further be used to evaluate the efficiency of the tracking system.
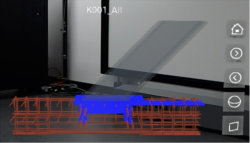
Augmented Reality (AR) is a novel technology, which is mainly in the state of research and rarely used in practice, especially in construction. In order to point out the capability of deployment and the potential fields of AR technology in the construction industry, this master thesis focuses on the technical experience of construction engineers. Different points of views and improvement suggestions are provided through interviews with those experts, who have worked on various construction projects. The challenges from construction projects and suggestions of deployment with AR are pointed out. Based on the evaluation of the experts’ suggestions, an application prototype with AR is developed to solve a practical problem and provides an example of the usage of BIM data with AR. The test of the prototype is carried out by the interview partners. The judgment of the prototyp as well as the usage of AR in the construction practice is worked out from the feedback of the test persons. Finally, the possibilities and challenges of the usage of AR technology in the surroundings of construction are discussed.
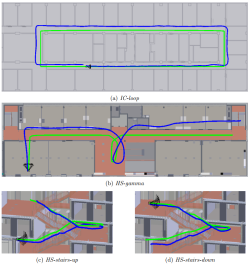
The ability of indoor pose estimation is an essential key component for a wide range of applications in the construction industry, such as progress monitoring of finished works or augmented reality-based maintenance and navigation of indoor facilities. There are numerous indoor localization methods based on different technologies, with an image-based approach via a mobile device being the most economical. This work aims to investigate an existing image-based approach using convolutional neural networks trained on synthetic images to estimate the pose of real images. Four datasets of indoor scenes from two buildings with various trajectory properties were created and independently analyzed. The average position accuracy was 11m, while an accuracy about 1m could be achieved by training and testing the artificial neural networks with a dataset from the same domain. Moreover, the networks using cross-domain data localized all test images in a confined area and estimated the orientation mostly as the same one.The ability of indoor pose estimation is an essential key component for a wide range of applications in the construction industry, such as progress monitoring of finished works or augmented reality-based maintenance and navigation of indoor facilities. There are numerous indoor localization methods based on different technologies, with an image-based approach via a mobile device being the most economical. This work aims to investigate an existing image-based approach using convolutional neural networks trained on synthetic images to estimate the pose of real images. Four datasets of indoor scenes from two buildings with various trajectory properties were created and independently analyzed. The average position accuracy was 11m, while an accuracy about 1m could be achieved by training and testing the artificial neural networks with a dataset from the same domain. Moreover, the networks using cross-domain data localized all test images in a confined area and estimated the orientation mostly as the same one.
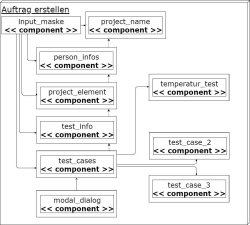
The Bosch Rexroth company in Dortmund has various test benches to test different types of gears used in agricultural machinery. The test benches are managed by different employees, so that an order must be created for the use. To get an overview of the orders, test stands and gearboxes used, an application that contains a suitable user interface and a data storage system must be developed. This bachelor thesis describes the conception and implementation of such an application, which we call the Data Aggregation Tool (DAT). Important aspects of planning in combination with agile project management, mockups and prototypes, as well as the implementation of different components, are discussed using the Framework Angular. Requirements for the application are defined with use cases and user stories. Different orders are divided into different categories, with one being considered complex enough for all other orders to build on. To test the implementation of the application, a limited evaluation is performed and evaluated.

Up to the present, only analogous applications for construction permit (ACPs) are accepted in Germany. Yet the submission of a digital ACP provides several advantages, especially when making use of existing federal standards in the areas of construction and planning. Further, the direct integration of Building Information Modeling (BIM) into a digital ACP process provide further potential. Within the scope of the ongoing research project "BIM-basierter Bauantrag" (BIM-based ACP), which aims to integrate BIM into the digital ACP process, one objective is the development of a software prototype suitable for realizing a BIM-based ACP process. An existing Desktop-based prototype already provides basic functionality. A web-based solution would offer further advantages, such as platform independency and centralized data environments. This work examines the migration of the existing Desktop application into a web-based environment. In order to be able to perform such a migration, this work provides an extensive requirements analysis. The migration's primary objective is to carry over as many software components into the new system as possible to minimize code changes. In order to achieve that goal, an appropriate strategy has been designed to develop a web-based client which reuses parts of the existing software as server-components. The resulting web-based software system has been evaluated using a real-life sample project.
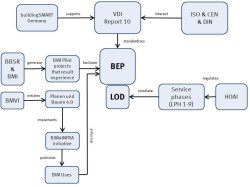
Project management and construction informatics had begun to blend and guide the construction industry internationally the last decade. Technological advancement gave naturally birth to the innovative Building Information Modelling method on the construction scene. With the introduction of a BIM Execution Plan, a company develops an agenda that describes all the steps of generating a project, clarifying the project goals and its coordination throughout the whole life-cycle of the structure. The expansion of the thesis is twofold. Namely, in the first part describes in detail the pure theoretical background of BIM Execution Plan and its adaptation on the company by a development of a Master BEP Format and a second task of a computational implementation method to automatize the quality control of buildings. The main aim of this scientific work within a Consulting Design in Construction Management business is to deliver the knowledge and enlighten the co-workers for the applied management tools of BIM that the market offers nowadays, as well as to advance the work-flow on BIM Uses that constitute a BIM Execution Plan’s input. The master thesis has been achieved by an elaborate literature and regulations review, whereas a continual use of the company’s provided software was assigned in order to realize the shortcomings on a genuine project. Moreover, an intense practice in Integrated Development Environments and programming languages was attained and ultimately a quality control tool for Revit Autodesk was implemented.
As self-driving technologies are implemented in autonomous vehicles an increase in the reliability on automotive electronics hardware is increasingly becoming a requirement. Current methods have statistical significance; this mean that they remain population-relevant and are prone to outliers. A new way to increase the reliability of automotive electronics systems and getting it closer to a 100% is to implement PHM. This would imply the presence of degradation sensors included in the silicon of the packages, enabling a more direct measure of quantities related to the degradation of the system. This thesis focuses on the development of three Machine Learning models for the prediction of degradation of electronic components. A data set is created from ETVs subject to accelerated ageing. This data is transformed to a compressed understandable form with various preprocessing techniques and then fed to the ML models. After tuning, the best model is picked and applied to new datasets. Expert knowledge from Bosch is used to validate the results at every stage. After having proved that the concept is valid, new models are developed using only a small dataset of ANSYS thermo-mechanical simulations data performed by Bosch and provided to the author and then used for prediction of real-world experimental stresses.
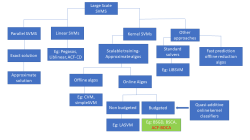
Support Vector Machines (SVMs) are popular machine learning methods, especially for binary classification of data. Computational complexity of kernelized (Non-linear) SVMs becomes a limiting factor when dealing with large-scale machine learning problems. This thesis presents an online adaptive version of Dual coordinate ascent that honours a budget constraint and restricts the number of support vectors used to represent the model. This new algorithm is coined as Adaptive coordinate frequency budgeted
stochastic coordinate descent (ACF-BDCA). The Budget methods have proven to be effective for reducing the training time of kernel SVM while retaining high accuracy. In addition to that, instead of fixing selection frequencies of a general Coordinate ascent with uniform random selection of coordinates, the Adaptive coordinate frequencies (ACF) method removes the need to estimate optimal coordinate frequencies beforehand, and it automatically reacts to changing requirements during an optimization run. The ACF-BDCA algorithm has demonstrated the ability to significantly speed-up the BDCA method. Also, a new robust stopping criterion was successfully designed to halt this non-convex optimization problem, while achieving good performance levels.
The integration of mechanical and electrical building equipment may cause issues and leads unquestionably to an increased complexity of the entire building process. Especially the planning of openings for technical equipment is a very complex procedure. The usage of classic methods for the coordination of openings between all the involved parties of a construction process causes inconsistencies and intransparency, as simultaneous work is not possible. Building Information Modeling (BIM) aims at providing appropriate means to tackle the challenges, thereby improving the overall transparency and quality. Coordination and communication during the planning of openings is possible because suitable BIM-based tools are already available. Despite its many benefits, however, the processes are too complex and deficient, especially when different data formats of opening-models have to be reconciled. This master thesis develops suitable processes for a significant improvement of the model-based planning and coordination of openings. Hereby the loss of information through different data formats will be compensated. By using the open BIM Collaboration Format (BCF), the transparency and traceability of coordination and communication processes is ensured.
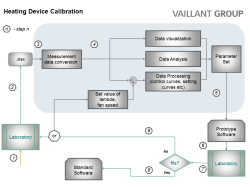
As a result of the mechatronization and the exponential growth in the number of product variants, the calibration effort of heaters is expanding intensely and demands new, more efficient approaches other than experimental laboratory testing. Within the scope of the present master thesis, an application tool was developed, the tool which is modular in design and was implemented based on the UI/UX concept so that the user can operate it intuitively, can be systematically used by a device development engineer to read, visualize and process measured data in order to automatically calculate functional parameters of a heating device.
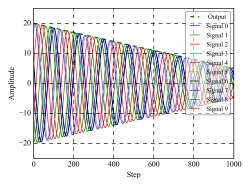
In the recent years a lot of new models have been developed in machine learning. One of such new model classes is Deep Recurrent Gaussian Process. In this thesis we de scribe the Deep Recurrent Gaussian Process with Variational Sparse Approximation, in particular the one presented by R. Föll, and make an attempt to provide a time and memory efficient implementation for it, in order to ease its practical application. We implement this model in two different packages, TensorFlow and PyTorch, supply as a result three implementation versions and indicate some issues that have arisen in the meanwhile. We further evaluate performance of our code and compare all three implementations in terms of system memory requirements and running time, estimating the most balanced one to be about 4.2 times faster and with no increase of system memory consumption, compared to initial implementation presented by the model’s author. Also, a brief estimation of model’s accuracy based on comparison with other Gaussian Process based models is made.

There are several service building components (SBC) like fire extinguishers and emergency exit sings in public buildings. Since they usually possess a prominent appearance and their locations are known, they can be used for indoor navigation. This thesis deals with a color-based preprocessing of images containing SBCs for a subsequent detection. The goal is to find relevant image patches, that may contain SBCs and, this way, reducing the search space within the image that needs to be examined for further object recognition. To achieve this, a dataset has been created which consists of fire extinguishers, fire alarm boxes, smoke funnel boxes and emergency exits. Since these SBCs possess salient colors, an object segmentation by color is reasonable to facilitate detection. For segmentation, each component's color range is determined by averaging over several samples. Segmentation is, then, performed in different color spaces in order to find the optimal color space by comparing the results. The HSV color-space demonstrated acceptable results across all objects but emergency exits. The LAB color-space shows the best results for emergency exits, however requires a vastly bigger runtime for the segmentation.
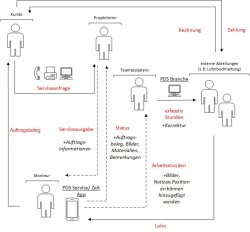
As a result of digitization, an increasing number of small and medium sized companies are forced to design and optimize internal operating processes. This is being accomplished with the help of today's intelligent technologists according to the vision of Industry 4.0. The present scientific work analyzes the state of digitalization in the craft industry. In this context, PDS, a craft specialized ERP System, is evaluated in Elomech Elektroanlagen GmbH as a practical example of how the software links internal processes with each other and thus optimizes the processes in the company. The focus of analysis is on the mobile applications of PDS Service App and PDS Zeit App, which enable the mobile administration of service orders and the digital recording of hours. Despite the gain of efficiency, the analysis shows that there are still existing challenges and risks for the company. In particular, issues regarding the privacy aspect of fitters needs to be a critical consideration.
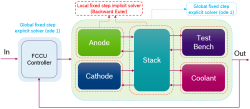
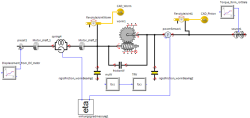
Real-time performance of fuel cell plant model developed in Simscape is evaluated and tested in this thesis. Various simulation models for fuel cell system are developed by different departments at Robert Bosch GmbH in various simulation platforms for e.g. Simscape, GT-Power. A matrix is developed for comparison of these simulation models based on different criteria like model type (0-D or 1-D), accuracy, validation, parameterization, parameter identification and modeling physics (physics based, data based and hybrid). Besides exploring the configurations of model like solver type, step size and usage of local solvers, built in performance packages of Simulink (e.g. Simulink profile report, Performance Advisor) are also used to further check the computationally intensive parts of the model in Simulink environment. It is observed that the execution time can be optimized by selecting a local solver and fixed-cost runtime consistency iterations on Simscape model. Later on different experiments were performed on Simscape fuel cell model on ETAS Labcar RTPC in Hardware-in-the-Loop environment to test the real time performance.

This thesis deals with the application of the Deep-Q-Learning method for a collision-free drone flight. Building on Reinforcement Learning, the aim is to use a drone as an "agent" by interacting with the environment using rewards or punishments. The goal is to teach a behavior to enable a collision-free movement through 3D space. To explore this, the realistic simulation environment AirSim is used where the real world is adequately represented. The drone can be controlled via a Python programming interface to interact with the environment according to physical laws. Depth images of a virtual camera attached to the front of the drone map the environment and are passed as input to an artificial neural network.
Traditional working practices of quantity and cost determination, which are still common in the construction industry, are characterized by a susceptibility to errors and time intensity due to their manual approach. Concerning this matter, the working methodology Building Information Modeling (BIM) offers a process optimization, which promises the avoidance of laborious and error-prone work by a consistent further use of digital information, resulting in an increase in quality and productivity. In the construction industry, engineering structures e.g. bridge and tunnel construction have different requirements compared to classical building structures, which ultimately also affect the implementation of BIM. Within the scope of this work, it was possible to develop a concept for an optimized BIM-based cost calculation in this field. As a result, workflow processes were used to describe the necessary work steps, roles and responsibilities as well as exchange formats for three application-specific scenarios relating to the building model and the cost structure. Finally, the feasibility of the concept was prototypically demonstrated using selected software products.

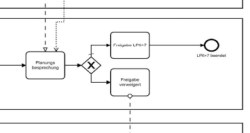
Transactions help to create reliable software and bring consistency and integrity to the system. Each transaction has to be completed successfully or aborted in the case of failure. Distributed transactions have the same properties of transactions and are a set of two or more transaction branches, which can span multiple data sources. The Vendo project is the process of booking Deutsche Bahn train tickets online per website or per “DB Navigator”, or via ticket vending machine. The project consists of various RESTful microservices. For each request of the user, a transaction will be generated. Each transaction has a transactionId and will be continued until the end. Implementation of transactions in such a large project can be tricky and presents some challenges. The goal of the thesis is to identify these challenges of implementing the transactions in Vendo project, find appropriate solutions for them, and monitor the transaction at the end to ensure that they work.

This work examines the various aspects in the development of a software application based on the architectural model of microservices und the expected benefits. Particular attention should be paid to compliance with data consistency in relational databases, through which transaction security must be addressed. For revision, a suitable prototype has been implemented. The architectural pattern "microservices" requires an unusual amount of communication over an insecure network (the Internet). Therefore, the risk of a network failure must be considered.
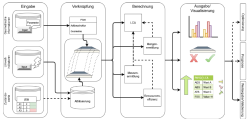
The focus of this thesis is the development of a LOD concept for 4D and 5D analysis using BIM for bridge structures. Such a LOD concept determines the geometric and semantic structure, where the levels of detail are to be defined and specified by specific parameters. Relevant requirements flow into the development of the LOD concept as well as the rules for scheduling and cost planning. Subsequently, a prototype implementation of the LOD concept using a workflow is presented.
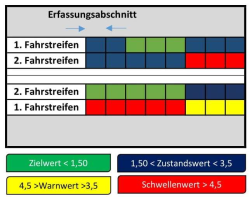
The roads and streets of Germany extend over a length of approximately 230,000 km must be continuously monitored and maintained. Both the age of many roads, dating back to the 1970s and 1980s, as well as the high traffic load of today force the road authorities to plan conservation measures using digital tools. In particular, the easy exchange of data required for road maintenance from the start of a repair project to the final phase between all involved is an important aspect. The benefits anticipated from the use of digital planning methods in road maintenance lead to increased efforts to further development of digital computer-aided methods.
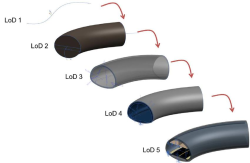
Due to the technological advances of computer-aided work processes, the method Building nformation Modeling (BIM) as a digital planning method based on 3D-models by now basically determines the developments in the construction industry. Since at least the publication of the graduated scheme „Digitales Planen und Bauen“ by the Federal Ministry of Transport and Digital Infrastructure, and therefore the requirement of a solid BIM-level for new infrastructure construction projects after 2020, standards and guidelines for the implementation of the BIM-methodology are urgently needed in bridge construction. The BIM-applications in different project phases differ both in terms of their requirements for model detailing and in the implementation of subject-specific analyzes. This is where the concept of the Level of Development (LoD) comes into play, which defines the level of detail of the digital building model in different requirement stages and ensures sufficient nformation content for the specific analyzes.
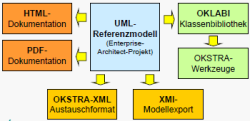
Road maintenance and restoration have undoubtedly the largest need of funding within the road infrastructure. Therefore, the careful planning of maintenance measures for roadways has extraordinary relevance. In particular, BIM systems have gained significant importance in engineering disciplines because they allow the linking of data and their dependencies in a data model. On the one hand, a high volume of data can be processed while, on the other hand, information can be specified in great detail. In maintenance planning, the OKSTRA standard is currently being used. As a result, a BIM-suitable data model for road construction based on the OKSTRA is discussed in this thesis.
This thesis presents an efficient best-effort approach to improve the simulation performance of a given virtual prototype of Electric Steering Column Lock Assembly (ESCLA) to make it real-time capable. This prototype is modeled and simulated in SimulationX software. While reducing the model, balance between accuracy and performance is maintained. Since it involves mainly mechanical and electrical components, special importance is given to capturing the associated physical events as far as possible. Subsequent use of such kind of reduced simulations is for the purpose of Model in Loop (MiL) testing of the components.
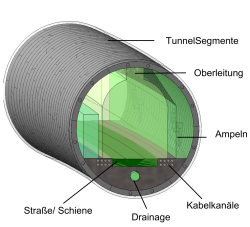
The need for Building Information Modeling (BIM) in the field of infrastructure engineering has never been greater. BIM is slowly but surely spreading worldwide and can be the game changer in the AEC (Architecture, Engineering & Construction) industry. The federal ministry of transport and digital infrastructure in Germany wanted to ensure, that digital planning and building will be established for the German AEC industry as well. Therefore, they introduced a roadmap for Digital Planning and Construction (Digitales Planen und Bauen) back in 2015, that aims at the standardization of Building Information Modeling within the infrastructure until 2020. Currently, research and experience from real projects are showing, that unified guidelines and standards should be defined for a successful use of the BIM method. For example, a definition of a geometric and semantic information depth of a digital model is for the building section with terms like Level of Development (LOD) internationally established. During this study, a concept for the description of Level of Development of tunnel structures with mechanical propulsion is developed.
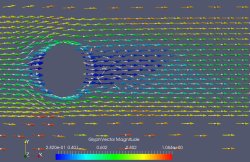
Numerical simulation for fluids, commonly called Computational Fluid Dynamics(CFD), has become standard tool for a wide range of industries. With the expansion of computing power demands for the physical accuracy, spacial and temporal boundaries of fluid simulations have increased. The common bottlenecks for numerical modeling fluids, include: large run times, computational power and expertise required. One novel solution that has been proposed to reduce the large run time is through the generation of black-box CFD surrogate models. This paper focuses on exploring the concept using Machine Learning methods to generate a CFD surrogate model to replicate entire simulation results. The novel concept of CFD surrogates was first reviewed by looking at the prior research. From an in depth review common strategies were determined and evaluated through experimentation.
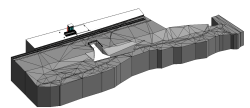
The rapid growing interest in working conditions with Building Information Modeling (BIM) raises the question, which processes can be realized with the available BIM-tools. To answer this question, this bachelor thesis will observe a geometric presentation of a tunnel which was created by a shield driving, to make a belated valuation of the installation quality. The geometric presentation is based on a modeled ring which will be placed on a three-dimensional track by using a parametric model. The modelling and the parametric model will be done by Revit and Dynamo, two programs from the company Autodesk. With the help of the ring modelling and the implementation with the model, a qualitative assessment methodology is put up to judge the situation exactness of tunnel driving afterwards. The feasibility and suitability of the methodology is checked with the help of a real use case.
In order to improve existing 3D models of urban environments the structure of facade elements and windows in particular is of high interest. Therefore, the problem of automated extraction of window locations from facade images is to be solved using methods of computer vision. In this approach a cascaded classifier is implemented and trained with various window examples. This classifier is used to detect windows in any presented image without requiring user intervention. The evaluation of it proved the trained classifier functioning properly. Further optimizations to allow for a more precise training, reconsiderations concerning the training set as well as possible postprocessing steps are inevitable for a practical detector based on this approach.
Microfluidic flows are prevalent everywhere in modern technologies. From lab-on-a-chip devices, to inkjet printing, to system biology, and in wetting and de-wetting phenomena for coating technologies, their application is ubiquitous. In this study we are interested in developing a novel framework with reduced dimensionality for open microfluidic problems. More specifically, we are interested in studying thin film flows using depth averaged viscous shallow-water equations with capillary forces and fluid-wall interactions included. We adopt the mesoscopic lattice Boltzmann method (LBM) to solve for the shallow water system.
The introduction of digital planning methods is a constant, fast-changing process.For engineers, it is important to always be up-to-date to meet the requirements of the clients.In the course of this master thesis, existing processes in the planning phase and in the engineering office itself are to be identified which can be optimized by the use of BIM.Through a fundamental research on the current dissemination status of BIM, nationally and internationally, as well as through the comparison of conventional planning and BIM planning, the foundation for an implementation strategy is to be laid.A specific example is carried out on the basis of a completed infrastructure project done at an engineering office.
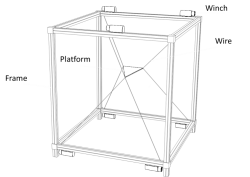
Recently, advances in the field of the so-called wire robot technology offer new prospects for the automation of large-scale processes. This thesis presents a simulation-based approach to analyze the technical and economic feasibility of wire robots for automated construction in future investigations. Masonry buildings are considered as an appropriate application case due to repetitive construction procedures and high demands concerning quality as well as accuracy of construction. A simulation model representing the fundamental mechanics of a wire robot is created including process-relevant objects and interactions. Special focus lies on creating collision-free motion profiles which can be exported to the robot control system and may serve as a basis for path planning. Building information models provided in the IFC format are used to set-up the simulation model and to prepare the required input data.
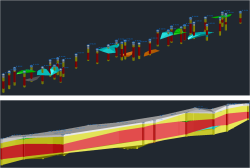
The aim of this thesis is to investigate the way to create a digital 3D-Subsoil-Model by using borehole data. Further, the usability if the used methods and possible benefits to the building industry should be analyzed. In the beginning, the thesis focuses on building information modeling and borehole technology to show the possible ways of generating 3D-Model by using borehole data. Following, the thesis examines the used add-ons for AutoCAD Civil-3D to create and to use a 3D-Subsoil-Model. Concluding, the model quality as well as the modeling efficiency is analyzed and evaluated.
This master thesis illustrates the importance of the Building Information Model for the German construction industry. The analysis of the conventional approach and the BIM based approach are compared to show the advantages and disadvantages of both methods. Using the BIM based software iTWO, a prototypical implementation is created to calculate quantity determination according to given construction guidelines. Furthermore, a strategy on the use of BIM is proposed for production planning and execution.
Copyright © 2025
Last update: Feb 11, 2025